Лабораторная работа №2. Теоретические положения
Теоретические положения
В системах автоматической стабилизации режимных параметров широко применяют замкнутые одноконтурные АСР, использующие принцип регулирования по отклонению.
Одноконтурные АСР можно представить в виде блок-схемы (рис.1), состоящей из объекта регулирования, регулятора и элемента сравнения. Состояние объекта регулирования характеризуется текущим значением регулируемой величины x(t). Текущее значение x(t) сравнивается с заданным значением x3(t) в элементе сравнения, в котором вырабатывается рассогласование Dx(t), являющейся ошибкой регулирования. Сигнал рассогласования преобразуется в соответствии с выбранным законом регулирования в регуляторе в регулирующее воздействие xp(t), которое поступает на объект. Свойства АСР определяются свойствами ее отдельных элементов.

Рис. 1. Блок-схема одноконтурной АСР.
Основная задача расчета АСР заключается в выборе закона регулирования и расчета параметров настроек регулятора, обеспечивающих устойчивую работу системы и оптимальные показатели качества работы АСР.
Для расчета АСР можно использовать различные подходы и методы определения параметров настроек регулятора.
Эти методы можно разделить на аналитические, графо-аналитические, эмпирические.
Широкое распространение получили методы имитационного моделирования с использованием компьютерных средств.
Для первого приближения в определении параметров настроек регулятора удобно воспользоваться эмпирическими соотношениями. Для этого необходимо свойства объекта аппроксимировать передаточной функцией инерционного звена первого порядка с звеном чистого запаздывания.

Такая аппроксимация осуществляется по кривой разгона объекта (рис.2), полученной аналитически или экспериментально.

Рис. 2. Оценка параметров Kоб, Tоб, tоб по кривой разгона объекта.
Параметры настроек регулятора определяются по эмпирическим соотношениям:

При исследовании АСР необходимо решить два основных вопроса :
- Вопрос устойчивости системы
- Вопрос качества процесса регулирования
В процессе имитационного моделирования решают вопросы устойчивости и качества работы АСР. При моделировании устойчивость оценивается непосредственно по получаемым переходным характеристикам работы АСР. Для устойчивого процесса переходная характеристика должна быть сходящейся, приводящая регулируемый параметр x(t) к заданному значению x3(t). Количественно запас устойчивости можно оценить по степени затухания процесса y, который определяется по кривой переходного процесса(рис.3) по соотношению:

где А1 и А3 экстремумы амплитуд двух соседних колебаний одного знака. Этот показатель для устойчивых систем должен быть в пределах y @ 0 , 9 ¸ 0 , 7.
Качество переходного процесса определяется по показателям, характеризующим отклонение реального процесса от желаемого. Количественно качество переходного процесса оценивается по следующим показателям (рис.3)

Рис. 3. Показатели качества переходного процесса.
- Статической ошибкой, являющейся отклонением регулируемого параметра от заданного значения в установившемся режиме.

- Динамической ошибкой, являющейся максимальным отклонением регулируемого параметра от заданного значения.

- Время регулирования tp, т.е. время в течении которого регулируемый параметр достигает заданного значения с заданной точностью e. Для практических АСР точность определяется пятипроцентным отклонением параметра от величины заданного значения e = ± 5 %
- Интегральный квадратичный критерий, являющийся обобщенным показателем.
![J=\int_{0}^{\infty}[x_{3}(t)-x(t)]^2dt](http://cisserver.muctr.ru/alkmw/images/math/3afc1e72466dd9cafce071a410d0397b.png)
Наилучшим качеством обладает АСР с минимальным значением интегрального квадратичного критерия, при сохранении заданного запаса устойчивости.
Типовые оптимальные процессы регулирования
Оптимальным процессом регулирования называют процесс, который соответствует минимуму (или максимуму) какого-либо показателя качества регулирования.
К типовым оптимальным процессам относят (рис. 4):
1) Граничный апериодический процесс с минимальным временем регулирования τпп min (рис. 4,а)
2) Процесс с 20% перерегулированием и минимальным временем первого полупериода колебаний (рис. 4, б)
3) Процесс с минимальным значением интеграла от квадрата ошибки (ИКО)min (рис. 4,в)

Рис. 4. Типовые оптимальные процессы регулирования
Для граничного апериодического переходного процесса характерно отсутствие перерегулирования, наименьшее воздействие управляющего устройства на объект и минимальное время регулирования по сравнению с процессами 2 и З.
Область применения: при значительном влиянии воздействия, которое является управляющим для рассматриваемой регулируемой величины, на другие технологические величины объекта (для которых оно является возмущающим воздействием), чтобы свести их отклонение к минимуму.
Для процесса с 20-проценптым перерегулированием характерны большее управляющее воздействие и большее время регулирования, но меньшая максимальная погрешность регулирования (по сравнению с процессом 1).
Область применения: при управлении объектами, которые допускают перерегулирование. Минимальное время первого полупериода колебаний, в котором имеет место наибольшее отклонение регулируемой величины от задания, является преимуществом, если остальная часть переходного процесса, где отклонения от задания уже сравнительно невелики, менее существенна.
Для процесса, обеспечивающего минимум интегрального квадратичного критерия, характерны наибольшее управляющее воздействие, наибольшее время регулирования и наименьшая максимальная погрешность регулирования (по сравнению с процессами 1 и 2), а также значительное перерегулирование (до 40 %).
Область применения: управление объектами, для которых максимальная погрешность регулирования должна быть как можно меньше.
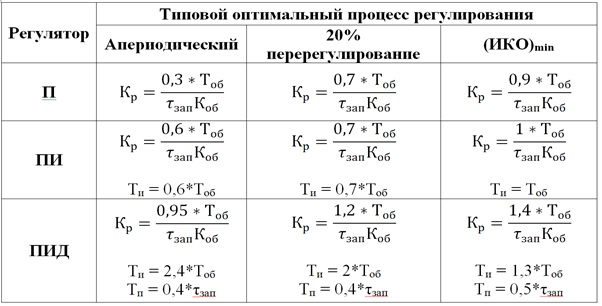
Приближенные параметры настройки П-, ПИ- и ПИД-регуляторов для статических объектов, позволяющие получить один из трех типовых процессов регулирования, приведены в таблице 2.
Таблица 2
Формулы для определения настроек регуляторов на статических объектах